5GФЪНшВзіРФШЎўІў·ўЦ§іЦЎўНЁРЕСУіЩөИ·ҪГжКөПЦБЛЦКөДМбЙэЎЈ5GТЖ¶ҜНЁРЕМṩNSAәНSAДЈКҪБҪЦЦНЁРЕЧйНш·ҪКҪЈ¬ЖдЦРNSAДЈКҪІЙУГЛ«Б¬ҪУ·ҪКҪЈ¬5G NRҝШЦЖГжГӘ¶ЁУЪ4G LTEЈ¬АыУГПЦУР4GәЛРДНшEPCЈ»¶шSAДЈКҪөД5G NRЦұҪУҪУИл5GәЛРДНшЈ¬КЗНкХы¶АБўөД5GНшВзЎЈ
ұҫОДЛщВЫКцөД5GТЖ¶ҜНЁРЕНшВзКЗ»щУЪ5G SA»щҙЎЙПЧцөДІъЖ··Ҫ°ёЙијЖЎЈ
УлNSAІ»Н¬Ј¬SAУР5GәЛРДНшЎЈФЪSAЧйНшПВЈ¬5GНшВз¶АБўУЪ4GНшВзЈ¬5GУл4GҪцФЪәЛРДНшј¶»ҘНЁЈ¬»ҘБ¬јтөҘЈ»ЦХ¶ЛҪцБ¬ҪУNRТ»ЦЦОЮПЯҪУИлјјКхЎЈПаұИSAЈ¬NSAИұБЛТ»ёц5GәЛРДНшЈ¬ФЪНшВзіРФШЎўІў·ўЦ§іЦЎўНЁРЕСУіЩөИ№ШјьЦёұкЙПҙжФЪ¶М°еЎЈ
ПаұИҙ«НіТЖ¶ҜНшВзЈ¬5GТЖ¶ҜНЁРЕУЕКЖФЪУЪЧФЙнөДёЯЛЩВКЎўҙуБчБҝЎўөНСУіЩөИМШөгЎЈ
ёЯЛЩВКЈә5GАнВЫҙ«КдЛЩ¶ИҝЙҙп4GөДКэ°Щұ¶Ј¬УГ»§¶ЛУҰУГЛЩВКҝЙҙп1GbpsЎЈЛЩ¶ИөДҙу·щМбЙэЈ¬ҝЙТФҪшТ»ІҪНШХ№»щҙЎРЕПўөДІЙјҜЎўЙПҙ«ЎўПВФШЛЩ¶ИЈ»5GТЖ¶ҜҪУИлЛЩ¶ИҝЙТФҙпөҪ500+km/hЈ¬УРР§ҪвҫціөБҫҝмЛЩТЖ¶Ҝ№эіМЦРНЁРЕ»щХҫҪУИлөДЖҪ»¬ЗР»»ОКМвЎЈБнНвЈ¬5GДҝұкКЗЧцөҪЧоҙу10GbpsЈ¬ҝЙТФИ«ГжВъЧгёЯЗеКУЖөЎўРйДвПЦКөЎўёЯЛЩРРК»Ўўҫ«ЧјЧчТөөИҙуКэҫЭБҝҙ«КдТӘЗуЈ¬ұ»ҙш¶ҜөДРРТөБмУт»№УРРйДвПЦКөј°ФцЗҝПЦКөЈ¬ұИИз№ӨіМ»ъРө3DіЎҫ°ДЈДвЎўКэҫЭН¬ЖБЎўФЪПЯ№КХПХп¶ПөИЈ¬ҝЙТФНЁ№эРйДвПЦКөҪшРРХ№КҫЈ¬ёьјУұгАыЎўЙъ¶ҜЎЈ
ҙуИЭБҝЈә5GНшВзУөУРҙуИЭБҝөН№ҰәДМШөгЈ¬Б¬ҪУКэГЬ¶ИЦ§іЦ100Нт/km²Іў·ўҪУИлЈ¬БчБҝГЬ¶ИЦ§іЦ10Ў«100Tbps/km²Ј¬И«ГжУҰУГЦ®әуҪ«ҪөөНБ¬ҪУіЙұҫЎЈҝЙПл¶шЦӘЈ¬ФЪ5GКұҙъЈ¬ТЖ¶ҜНЁРЕІ»ҪцҫЦПЮУЪУйАЦБмУтЈ¬ФЪ№ӨТөіЎҫ°УҰУГ·ҪГжТІУРЧЕІ»ҙнөДјЫЦөЎЈ
өНСУіЩЈә5GТЖ¶ҜНЁРЕөДҝХЦРҪУҝЪКұСУЛ®ЖҪФЪ1msЧуУТЈ¬ҝЙТФВъЧгЧФ¶ҜјЭК»ЎўОЮИЛЧчТөЎўФ¶іМТҪБЖөИКөКұУҰУГЎЈЖдҪөөНКұСУөДІЯВФЦчТӘҙУИэ·ҪГжҪшРРУЕ»ҜЈәТ»КЗҝХҝЪҪУИлКұСУІЙУГі¬¶МЦЎәНМбёЯФШІЁұҫХсЖөВКФҙ¶МЖЪЖөВКОИ¶Ё¶ИЈ¬¶юКЗіРФШНшКұСУІЙИЎИ«№вНшG.MetroјјКхәНөҘПЛЛ«Птҙ«КдјхЙЩКұСУІоЈ¬ИэКЗәЛРДНшКұСУІЙИЎУЕ»ҜЧӘ·ўВ·УЙәНјхЙЩУіЙдёҙУГІгҙОТФј°ТФНшВзПВіБөИКөПЦөНСУіЩЎЈ
ҝЙТФФӨјыЈ¬ФЪҙ«НіТЖ¶ҜНЁРЕНшВзГжПт·юОсИЛөД·¶іл»щҙЎЙПЈ¬5GТЖ¶ҜНЁРЕНшВзҝЙТФВъЧгЦЗДЬЦЖФмЎўV2XіөБӘНшЎўФ¶іМТҪБЖЎўТЈІЩЧчЎўёЯЗеЙгПсөИРРТөПё·ЦКРіЎРиЗуЈ¬ҫЯұёЦ§іЦНтОп»ҘБӘЗұФЪДЬБҰЎЈ
5GРРТөУҰУГјЫЦө
»щУЪҙ«НіТЖ¶ҜНЁРЕөДіөБӘНшУҰУГ»щұҫЙПјҜЦРФЪФ¶іМ¶ЁО»ЎўФ¶іМЛшіөЎўФ¶іМҪвЛшЎўФ¶іМЖф¶ҜЎўФ¶іМҝӘ№ШҝХөчЎўФ¶іМЙэј¶өИіөБҫ·ЗТЖ¶Ҝ»тЧчТөПа№ШөД№ҰДЬУҰУГЈ¬ИұК§КөКұРФКэҫЭНЁРЕЧҙМ¬ПВЈ¬¶ФіөБҫөДЧчТөҝШЦЖ»тРРК»ҫцІЯЈ¬ОӘҙЛіөБӘНшРиТӘёьөНКұСУәНёьёЯҝЙҝҝРФөДНЁРЕНшВзЎЈТ»·ҪГжЈ¬іөБҫФЪЧчТө»тёЯЛЩФЛ¶Ҝ№эіМЦРЈ¬ТӘКөПЦіөБҫЧҙМ¬КөКұІЙјҜЎўЧчТөҝШЦЖЎўРРК»ҫцІЯЎў°ІИ«ФӨҫҜ№ҰДЬөИЈ¬НЁРЕКұСУРиТӘФЪmsј¶ұрЈ»БнТ»·ҪГжЈ¬іцУЪ°ІИ«јЭК»»тЧчТөТӘЗуЈ¬ПаҪПУЪҙ«НіТЖ¶ҜНЁРЕЈ¬іөБӘНшФЪёЁЦъКөКұРФЧчТөәНёЯЛЩФЛ¶ҜКұЈ¬РиТӘёьёЯөДҝЙҝҝРФЎЈ
2020Дк7ФВЈ¬өЪИэҙъәПЧч»п°йјЖ»®ЈЁ3GPPЈ©ТСХэКҪРыІјR16ұкЧј¶іҪбЈ¬ұкЦҫЧЕ5GҪ«ҪшИлҙ№ЦұРРТөөДОпБӘНш·ўХ№РВҪЧ¶ОЎЈФЪіөБӘНшБмУтЈ¬R16ұкЧјИ«ГжЦ§іЦіөУліөЈЁV2VЈ©әНіөУлВ·ІаөҘФӘЈЁV2IЈ©ЦұБ¬НЁРЕЈ¬ВъЧгіөБӘНш¶ФЧчТөҝШЦЖЎўРРК»ҫцІЯөДёЯЛЩВКЎўөНСУКұЎўёЯҝЙҝҝРФөИ·ҪГжөДСПёсТӘЗуЈ¬РОіЙҝмЛЩЎў°ІИ«ЎўёЯР§өДV2XіөБӘНшУҰУГЎЈ
5GІ»ҪцНЖ¶ҜіөБӘНшөДЦЗДЬ»ҜУҰУГЈ¬ТІҪ«НЖ¶ҜХыіөі§ЙМТөДЈКҪҙУөҘТ»іөБҫПъКЫЦрІҪЧӘұдіЙЧчТө·юОсЎўіцРР·юОсЎў·юОсСУұЈЎўUBIұЈПХөИФцЦө·юОсДЈКҪЎЈёщҫЭABI ResearchФӨІвЈ¬2025Дк5GБ¬ҪУөДіөБҫҪ«ҙп5030НтБҫЈ¬ЖыіөөДөдРН»»ҙъЦЬЖЪКЗ7~10ДкЈ¬ТтҙЛЈ¬ҝЙТФФӨјы5G+№ӨіМ»ъРөКРіЎ№жДЈҪ«ФЪ2025-2030Дкјдҙу·щФціӨЎЈ
РРТөКөјщј°·ЦОц
РРТөКөјщЗйҝц
2019Дк4ФВЈ¬ФЪөВ№ъДҪДбәЪұҰВнХ№ЙПЈ¬ә«№ъ¶·ЙҪЈЁDoosanЈ©КЧҙОХ№КҫБЛ»щУЪ5GТЖ¶ҜНЁРЕјјКхөДЦЮјКТЈҝШ·Ҫ°ёЎЈФЪөВ№ъТЈҝШЖдФЪә«№ъөДНЪҫт»ъЈ¬№Щ·ҪРыіЖКэҙ«СУіЩОӘ20msЎЈөВ№ъДҪДбәЪҫаАлә«№ъФјОӘ8500kmЈ¬ТФ№вПЛЦР№вЛЩ200000km/sЈ¬әцВФҪ»»»СУіЩЈ¬ЦчёЙНшҙ«КдЧо¶МКұјдОӘ8.5K/200K=42.5msЎЈТФ5GҝХҝЪ1msСУіЩјЖЛгКХ·ў¶ЛКФСйЈ¬ЧЬКұСУУҰІ»өНУЪ44.5msЈ¬ҫЎ№ЬЖдРыҙ«іЙ·ЦҪПҙуЈ¬ө«іЙ№ыИФі¬ФҪБЛДҝЗ°ЖдЛыЦчБчјјКхЎЈК№УГ5GФЪҪьҫаАлЈЁ100kmТФДЪЈ©ТЈІЩЧч№ӨіМіөБҫЈ¬КұСУҝЙФ¶өНУЪДҝЗ°өДЛщУРЖдЛыНшВзҪвҫц·Ҫ°ёЎЈ
2019Дк3ФВЈ¬ЙҪ¶«БЩ№ӨБӘәПЦР№ъБӘНЁЎўЦРРЛНЁС¶Ј¬№ІН¬КөК©5GФ¶іМТЈҝШНЪҫт»ъПоДҝЈ¬НЁ№эЦР№ъБӘНЁ5GНшВзУлФ¶¶ЛҝШЦЖКТПаБ¬Ј¬КөКұҝШЦЖО»УЪЙҪ¶«БЩ№ӨҝуЙҪЧЫәПКөСй»щөШөДНЪҫт»ъЈ¬Н¬ІҪ»Шҙ«ХжКөЧчТөіЎҫ°ј°КУЖөЎЈ№Щ·ҪіЖХыМеКэҙ«РЕәЕКұСУ25msЧуУТЈ¬КУЖөРЕәЕКұСУ300msЧуУТЎЈ
2019Дк6ФВЈ¬ФЪТЖ¶ҜКАҪзҙу»бЈЁMWCЈ©»ӘОӘХ№МЁЈ¬»ӘОӘЎўИэТ»ЦШ№ӨЎўФҫРҪҝЖјјИэјТ№«ЛҫБӘәПХ№іцБЛ»щУЪ5GТЖ¶ҜНЁРЕөДіөБҫФ¶іМІЩҝШПөНіЈ¬ФЪПЦіЎУЙТ»ГыІЩЧч№ӨКөКұІЩҝШФ¶ФЪ1200№«АпНвөДТ»МЁОЮИЛНЪҫт»ъЈ¬ПЦіЎХ№КҫБЛіөБҫТЖ¶ҜЎўРэЧӘЎўНЪҫтөИІЩЧчЎЈёщҫЭПЦіЎЗйҝц№АјЖЈ¬ёГПөНіНјҙ«КұСУФјОӘ250msЧуУТЎЈБнНвЈ¬ёГПөНіФЪНЪҫт»ъНвІҝЕдЦГБЛТ»ёцБўёЛЙгПсН·Ј¬ҪшРРіөБҫПЦіЎЗйҝцөДКөКұХ№КҫЈ¬НЪ¶·әННЪҝУЕдУРПаУҰөДЙгПсН·ҪшРРЕДЙгЈ¬ІЩЧчМЁЗ°·ҪЧЁГЕЕдЦГБЛТ»ёцНЪ¶·ЗйҝцөДКөКұХ№КҫЖБЎЈ
РРТөКөјщ·ЦОц
»щУЪ5GТЖ¶ҜНЁРЕјјКхёЯЖөКфРФЈ¬ФЪҙ«КдБчБҝЙПКЗ4GөД20ұ¶ЧуУТЈ¬ө«КЗГҝёц5G»щХҫёІёЗ·¶О§ФЪ250mЧуУТЈ¬¶шГҝёц4G»щХҫөДёІёЗ·¶О§ҙуФјКЗ1000mЧуУТЎЈХХҙЛНЖЛгЈ¬Гҝёц4G»щХҫөДёІёЗ·¶О§Ј¬РиТӘҙуФј4ёц5G»щХҫАҙёІёЗЎЈҪШЦБ2019ДкөЧЈ¬ОТ№ъҪЁіЙөД4G»щХҫ440НтёцЧуУТЈ¬Из№ыҪ«ХвР©»щХҫёІёЗөД·¶О§И«ІҝУГ5G»щХҫёІёЗөД»°Ј¬ДЗГҙИ«ГжҪЁіЙ5GНшВзЛщРиТӘөД5G»щХҫЦБЙЩТӘ1800НтёцЈ¬5GөДҪЁЙиіЙұҫ»бКэұ¶МбёЯЎЈҪПёЯҪЁЙиіЙұҫҫц¶ЁБЛЖдЗ°ЖЪІҝКрТ»¶ЁКЗО§ИЖіЗКРЎўёЯЛЩ№«В·ЎўҝуЙҪЧчТөөИМШ¶Ё·¶О§»тРРТөХ№ҝӘЎЈ
»щУЪ5GКУЖөҙ«Кдј°Ф¶іМҝШЦЖІЩЧчТСҫӯіЙОӘёчёцЦч»ъі§ҝЖјјСР·ўөДҪ№өгЈ¬ө«КЗҙуІҝ·ЦјҜЦРФЪјјКхСйЦӨҪЧ¶ОЈ¬ҫаАлЙМТөНЖ№г»№УРҫаАлЎЈ
ДҝұкіөБҫЦЬО§іЎҫ°јаҝШЈ¬»щұҫЙПКЗТАҝҝНв№ТЙгПсН·ҪвҫцЈ¬ДҝұкіЎҫ°№М¶ЁЈ¬ОЮ·ЁКөПЦТЖ¶ҜЧҙМ¬јаҝШЎЈ
НЁРЕЗйҝцЕР¶ПУл°ІИ«ұЈХПІЯВФИұК§Ј¬ЙПКцјёјТөДУҰУГіЎҫ°Ј¬»щұҫЙПТФСЭКҫОӘЦчЈ¬НЁРЕБҙВ·ЗйҝцУліөБҫЧФЦч°ІИ«ІЯВФОҙјыХ№КҫЎЈ
»щұҫЙПҙҰУЪПЦіЎИЛ№ӨЖф¶ҜЎў№ШұХ·ў¶Ҝ»ъЧҙМ¬Ј¬РиТӘПЦіЎИЛ№ӨҪйИлҪП¶аЈ¬ІўОҙКөПЦХжХэТвТеөДФ¶іМІЩЧчЎЈ
»щұҫЙПО§ИЖөҘ»ъјаҝШКөПЦЈ¬¶аАаРНіөБҫРӯН¬ЧчТөЈ¬»№ОҙјыУРВдөШУҰУГЎЈ
5GТЈІЩЧчҪвҫц·Ҫ°ё
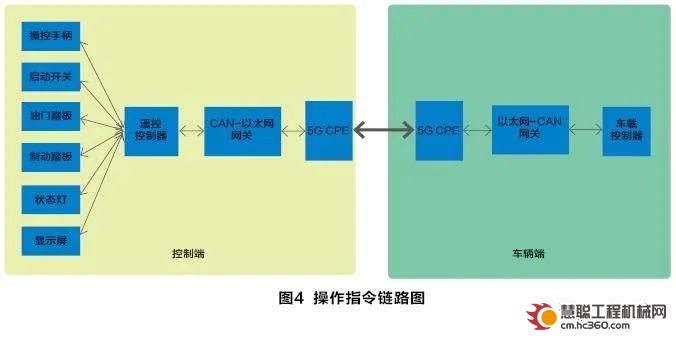
5GТЈІЩЧчПөНіјЬ№№ЦчТӘ°ьә¬ИэёцІгГжЈ¬јҙіөБҫ¶ЛЎўНшВзІгЎўФЖЖҪМЁЎЈНЁ№э¶аВ·ҫ¶НшВзФЪіөБҫ¶ЛәНФЖЖҪМЁЦ®јдКөПЦКэҫЭҙ«КдЈ¬№№ҪЁРӯН¬ЦЗДЬөДФ¶іМІЩЧчЦ§іЕНшВзЎЈіөБҫ¶ЛЦчТӘ°ьАЁіөБҫәНіөФШЙиұёЈЁИзАЧҙпЎўЙгПсН·ЎўҝШЦЖЖчЎўіөФШНш№ШЎў5G CPEЎў¶ЁО»ЙиұёөИЈ©ЎЈНшВзІг»щУЪ4GЎў5GЎўCANЧЬПЯЎўіөФШТФМ«НшЎў№вПЛөИ№№ҪЁРЕПўҙ«КдНшВзЈ¬ОӘіөБҫ¶ЛУлФЖЖҪМЁЦ®јдҙоҪЁёЯЛЩВКЎўөНСУіЩЎўёЯҝЙҝҝРФөДНЁРЕБҙВ·Ј¬ІўЦ§іЦНШХ№іөБҫјдәНіөВ·јд»ҘБӘ»ҘНЁөДНшВзјЬ№№ЎЈФЖЖҪМЁФтҝЙТФКөПЦіөБҫФ¶іМјЭК»№ЬАнЎўөч¶И№ЬАнЈ¬3DДЈДв·ВХжЎўФ¶іМЙэј¶ЎўФ¶іМ№КХПХп¶ПөИЎЈ

ПөНіНШЖЛјЬ№№
5GТЈІЩЧчПөНіҝЙТФКөПЦ»щУЪөҘіөөДФ¶іМОЮИЛІЩЧчЈ¬»№ҝЙТФОӘ»ъИәРӯН¬ЧчТөМṩ»щҙЎЦ§іЕЎЈТ»·ҪГжҝЙТФФ¶ҫаАлөДҝШЦЖәНІЩЧчіөБҫҪшРРЧчТөЈ¬ёДЙЖЧчТөЗҝ¶ИЎўҪөөН»·ҫіУ°ПмЎўЗҝ»ҜЧчТө°ІИ«өИЈ¬БнТ»·ҪГжФЪ¶аАаРНіөБҫОЮИЛЧҙМ¬ПВРӯН¬ЧчТөКұЈ¬өұіөБҫіцПЦЧФЙнОЮ·ЁҙҰАн»тХЯТміЈЧҙҝцКұЈ¬ҝЙТФКөК©ИЛ№ӨёЙФӨЈ¬НЁ№эКөКұёРЦӘәНН¬ЖБХ№КҫЈ¬КөКұБЛҪвіөБҫЧҙМ¬ј°ЦЬұЯ»·ҫіЈ¬¶ФЖдҪшРРИЛ№ӨФ¶іМјЭК»ІЩЧчЈ¬ёЁЦъ»ъИәҝмЛЩҪвіэХП°ӯәНОКМвЈ¬ҝмЛЩ»ЦёҙРӯН¬ЧчТөЎЈ
јјКхКөПЦВ·ҫ¶Јә1.іөБҫ¶ЛЙПЕдЦГ¶аВ·ІЙУГAHDёЯЗеөД1080PЙгПсН·Ј¬ЖдЦРЈ¬1В·НвЦГОЮПЯИ«ҫ°ЙгПсН·ЎЈ2.іөБҫ¶ЛЕдЦГ·АЕцЧІЧӨіөПөНіЈЁAEBЈ©Ј¬өұФ¶іМТЈҝШК§БӘ»тХмІвөҪЗ°·ҪХП°ӯОпКұЈ¬іөБҫ»бЦч¶ҜНЈіөәННЈЦ№ЧчТөЈ¬ТФұЈХПЧчТө°ІИ«ЎЈ3.іөБҫ¶Л1В·НвЦГОЮПЯИ«ҫ°ЙгПсН·ІЙУГWiFiКэҫЭҙ«КдЈ¬ЦұБ¬өҪ5G CPEЈ¬ІЙУГ¶АБўп®өзіШ№©өзЈ¬өҘҙОРшәҪКұіӨ36РЎКұТФЙПЎЈ4.іөБҫ¶Л¶аВ·ЙгПсН·КУЖөБчНЁ№э¶аВ·КУЖөұаВлЖчҙ«ЛНөҪ5G CPEЈ¬ФЪҝШЦЖ¶ЛНЁ№э5G CPEҪУКХәуЈ¬ҫӯ№э№ӨҝШ»ъКдіцөҪҝШЦЖ¶ЛөДПФКҫЖчЙПЎЈ5.іөБҫЧЬПЯҝШЦЖРЕәЕНЁ№эCANЧӘТФМ«НшНш№Шҙ«КдөҪ5G CPEөДБнТ»ЧйНЁөАЈ¬ФЪҝШЦЖ¶Л5G CPEҪУКХәуЈ¬ҙ«өЭөҪТФМ«НшЧӘCANНш№ШЈ¬әНҝШЦЖ¶ЛҪЁБўКэҫЭ»ҘНЁЎЈ6.ФЪҝШЦЖ¶ЛІЙУГҝШЦЖЖчКөПЦІЩҝШКЦұъЎўЖф¶ҜҝӘ№ШЎўУНГЕМӨ°еөИРЕәЕІЙјҜәН·ўЛНЎЈ
Нјҙ«КэҫЭБҙВ·
јјКхКөПЦВ·ҫ¶Јә1.НЁ№эіөБҫ¶ЛНвЦГЙгПсН·КөКұІЙјҜіөБҫЧчТөПЦіЎКУЖөЈ¬ІўНЁ№эҪ»»»»ъҪшРРұаВлЈ¬НЁ№э5G CPEҙ«КдБҙВ·ҙ«КдөҪҝШЦЖ¶ЛөДҪ»»»»ъЎў№ӨҝШ»ъЈ¬ЧоЦХХ№КҫФЪҝШЦЖ¶ЛөДПФКҫЖчЙПЎЈ2.іөБҫ¶ЛЕдЦГөДНвЦГОЮПЯИ«ҫ°ЙгПсН·Ј¬ёәФрХыіө»·ҫіЙПөЫКУҪЗЕДЙгЈ¬ҝЙТФНЁ№эWiFiҙ«КдөҪіөБҫ¶Л5G CPEЈ¬ФЩНЁ№э5Gҙ«КдБҙВ·ҙ«КдөҪҝШЦЖ¶ЛөДҪ»»»»ъЎў№ӨҝШ»ъЈ¬ЧоЦХХ№КҫФЪҝШЦЖ¶ЛөДПФКҫЖчЙПЎЈ



ІЩЧчЦёБоБҙВ·
јјКхКөПЦВ·ҫ¶Јә1.јҜіЙБЛІЩҝШКЦұъЎўЖф¶ҜҝӘ№ШЎўУНГЕМӨ°еЎўЦЖ¶ҜМӨ°еЎўЧҙМ¬өЖөИЙиұёөДТЈІЩЧчҝШЦЖ¶ЛЈ¬ёәФрІЩҝШЦёБо·ўЛНЎЈ2.ІЩҝШЦёБоҙ«КдөҪТЈҝШҝШЦЖЖчЈ¬И»әуТЈҝШҝШЦЖЖчНЁ№эCANНЁРЕҙ«КдөҪCANЧӘТФМ«НшНш№ШЎЈ3.ФЪCANЧӘТФМ«НшНш№ШЈ¬Ҫ«CANРЕәЕЧӘіЙТФМ«НшРЕәЕЎЈ4.ТФМ«НшРЕәЕНЁ№э5Gҙ«КдБҙВ·әНіөБҫ¶ЛөДТФМ«НшЧӘCANНш№ШЈ¬ҙ«КдөҪіөФШҝШЦЖЖчЈ¬КөПЦіөБҫРРК»ЎўЧчТөөДФ¶іМҝШЦЖЎЈ5.іөФШҝШЦЖЖчІЙјҜөҪіөБҫРРК»ЎўЧчТө№ӨҝцЎў№КХПРЕПўөИТІҝЙТФНЁ№эЙПКцЦёБоҙ«КдБҙВ·ДжПт»Шҙ«ЦБҝШЦЖ¶ЛЈ¬ФЪҝШЦЖ¶ЛөДПФКҫЖчЙПХ№КҫЎЈ
ЧҙМ¬ПФКҫБҙВ·
јјКхКөПЦВ·ҫ¶Јә1.ФЪіөБҫ¶ЛҝШЦЖЖчЙПЈ¬ІЙјҜіөБҫУНПдУНБҝЎўУНәДЎўҙуөЖЧҙМ¬Ўў·ў¶Ҝ»ъЧҙМ¬ЎўХр¶ҜКэҫЭөИ№ӨҝцРЕПўЈ¬НЁ№эCANЧӘТФМ«НшНш№Шҙ«КдөҪіөБҫ¶Л5G CPEЎЈ2.іөБҫ№ӨҝцРЕПўНЁ№э5Gҙ«КдБҙВ·Ј¬ҙ«КдөҪҝШЦЖ¶ЛөДТФМ«НшЧӘCANНш№ШЈ¬CANКэҫЭҙ«КдөҪҝШЦЖ¶ЛөДЧҙМ¬ҝШЦЖЖчЎЈ3.ФЪҝШЦЖ¶ЛөД№ӨҝШ»ъәНЧҙМ¬ПФКҫГж°еЙПЈ¬Х№КҫіөБҫөДКөКұ№ӨҝцРЕПўЎЈ4.іөБҫ¶ЛөДХр¶ҜКэҫЭНЁ№э¶ҜёРҝШЦЖЖчДЈДвПЦіЎХр¶ҜЗйҝцЈ¬ІўФЪҝШЦЖ¶ЛөД¶ҜёРҝШЦЖМЁЙПМеПЦЎЈ
Ф¶іМІЩЧч°ІИ«ІЯВФ
іөБҫ¶ЛҫЯұёКЦ¶Ҝ/ТЈҝШЗР»»№ҰДЬЈ¬ЗТКЦ¶ҜІЩЧчУЕПИј¶ёЯУЪТЈҝШІЩЧчЈ¬МШКвЗйҝцПВЈ¬ұгУЪИЛ№ӨҪйИлІЩЧчіөБҫЎЈФ¶іМЖф¶Ҝ·ў¶Ҝ»ъМхјюЈ¬»щУЪіөБҫACCҝӘөДЗйҝцЈ¬іөБҫөзЧУНЁРЕЧФјмНЁ№эЈ¬ІўЗТОЮО»ЦГТЖ¶ҜЎЈФЪКУЖөҙ«КдСУКұі¬№э500msЈ¬іөБҫҫЯұёұЈіЦКөКұЧҙМ¬І»ұд№ҰДЬЈ¬ЧФ¶ҜҙҰУЪҙэГьЧҙМ¬ЎЈФЪКэҫЭҙ«КдРЕәЕЦР¶Пі¬№э150msКұЈ¬іөБҫРРК»әНЧчТөЧФ¶ҜНЈЦ№Ј¬О¬іЦПЦЧҙЈ¬ЧФ¶ҜҪшИлҙэГьЧҙМ¬ЎЈФЪіөБҫіцПЦЗгІаі¬№э25°КұЈ¬іөБҫЧчТөЧФ¶ҜНЈЦ№Ј¬ЧФ¶ҜҪшИлҙэГьЧҙМ¬ЎЈ
УҰУГЗчКЖ
5GТЖ¶ҜНЁРЕМжҙъОЮПЯөз
5GТЖ¶ҜНЁРЕјјКхіцПЦЦ®З°Ј¬ФЪ4GНЁРЕСУіЩҪПҙуөДЗйҝцПВЈ¬»щУЪөҘіөТЈҝШјјКхТ»°гІЙУГОЮПЯөзНЁРЕ·ҪКҪКөПЦҪьіЎ1km·¶О§ДЪөДТЈҝШІЩЧчЈ¬ө«ЧчТө°лҫ¶ПЮЦЖЎўКэҫЭҙ«КдСУіЩЎўҙ«КдҙшҝнХӯөИТ»ЦұКЗПЮЦЖТЈІЩЧчУҰУГНЖ№гөДЦчТӘФӯТтЈ¬ФЪ5GКұҙъЈ¬ҪиЦъЖдёЯЛЩВКЎўҙуИЭБҝЎўөНСУіЩөИМШөгЈ¬ҝЙТФКөПЦі¬Ф¶ҫаАлТЈІЩЧчУҰУГЈ¬КЗМжҙъОЮПЯөзөДҪПәГөДҪвҫц·Ҫ°ёЎЈ
КэЧЦН¬ЖБУҰУГ
»щУЪ5GөНСУіЩјјКхЈ¬ҝЙТФКөПЦіөБҫТЗұнКэҫЭКөКұІЙјҜәНХ№КҫЈ¬КөПЦФ¶іМДЈДвіөБҫЧчТө№ӨҝціЎҫ°Ј¬јЗВјГҝТ»ЧйЧЬПЯ№ӨҝцРЕПўЈ¬ҪиЦъ3DҪЁДЈәНARУлVRјјКхЈ¬КөПЦіөБҫЧчТө№ӨҝцөДФЖЖҪМЁКэЧЦЛ«°ыМҘХ№КҫЈ¬Зҝ»ҜСщ»ъөчКФЈ¬Зҝ»ҜСР·ў№эіМКэҫЭ»ҜЦ§іЕЈ¬Зҝ»ҜИЛ»ъҪ»»ҘЈ¬УЕ»ҜФ¶іМ№КХПХп¶ПөИЎЈ
»ъЖчС§П°УҰУГ
»щУЪ5GёЯЛЩВКәНөНСУіЩјјКхЈ¬өҘёціөБҫҝЙТФФЪІ»Н¬Кұ¶ОС§П°Ј¬»щУЪҪЎҝөЧҙМ¬ПВіөБҫ№ӨҝцКэҫЭИХЦҫЈ¬ЦрІҪЕаСшәНСөБ·іцҪЎҝөЧҙМ¬іөБҫФЛРРөДС№БҰЎўОВ¶ИЎўЛЩ¶ИЎўХс¶ҜЖөВКөИ№ӨҝцІОКэРЕПўЈ¬Т»ө©іөБҫ·ўЙъІОКэТміЈ»тОКМвЈ¬БўјҙФӨҫҜЈ¬Жф¶ҜөҘ»ъЧФЦчС§П°әН№ҰДЬ»ЦёҙЎЈФЪПаН¬іөБҫАаРНЦ®ЦРЈ¬ҝЙТФКөПЦІ»Н¬іөБҫјдЧчТөБчіМәНРРОӘҫцІЯөДПа»ҘС§П°Ј¬Т»ө©іөБҫіцПЦ№КХПЈ¬ҝЙТФНЁ№э5GТЖ¶ҜНЁРЕәНФЖЖҪМЁКэҫЭЦРРДЈ¬КөПЦІ»Н¬іөБҫЦ®јдРРОӘҝШЦЖУлҫцІЯ№ІПнЈ¬ЧоҙуіМ¶ИөДКөПЦіөБҫАыУГВКЧоҙу»ҜЎЈФЪІ»Н¬іөБҫАаРНЦ®јдЈ¬ҝЙТФКөПЦ№ІРФЧчТө№ӨҝцУлРРОӘҫцІЯөД№ІПнЈ¬Ц§іЦФЖЖҪМЁІ»¶ПНкЙЖәНСөБ·ЧоУЕЧчТөәНРРК»ҫцІЯДЈРНЈ¬ОӘІ»Н¬іөБҫАаРНЦ®јдПа»ҘРӯН¬ЧчТөМṩЧоУЕТэөјәНЦ§іЦЎЈ
Ф¶іМЧФХп¶ПәН»Цёҙ
ФЪ5GТЖ¶ҜНЁРЕЦ®З°Ј¬»щУЪ4GТЖ¶ҜНЁРЕМхјюПВөДФ¶іМ№КХПХп¶ПГжБЩЧЕХп¶ПКэҫЭРЕПўҙ«КдөДСУіЩОКМвЈ¬ЖдКэҫЭСУіЩТ»°гіЩУЪПЦіЎ300msТФЙПЈ¬КЗіөБҫ·ўЙъ№КХПәуөДәу·ўҙҰАн·ҪКҪЈ¬¶шФЪ5GНЁРЕЧҙМ¬ПВЈ¬»щУЪіөФШЧЬПЯCANәНТФМ«НшЈ¬ҪбәПФӨПИЙијЖөД№КХПХп¶ПҙъВлУлөИј¶¶ЁТеЈ¬ҝЙТФКөПЦёЯЖөКэҫЭІЙјҜәНҙ«КдЧҙМ¬ПВөДФ¶іМ№КХПХп¶ПЈ¬Т»ө©іөБҫ·ўЙъТміЈ»тОКМвЈ¬№КХПАаҙъВлј°КұФЪПЯЙПХ№КҫЈ¬ҪбәП»ъЖчС§П°№ҰДЬЈ¬КөПЦіөБҫН¬ІҪЧФОТХп¶ПЈ¬ІўҝЙТФҪиЦъФЖЖҪМЁКэҫЭЦРРДКөК©Инјю°жұҫЧФЦчК¶ұрәНИнјюПВФШУлёьРВЈ¬КөПЦЧФ¶Ҝ№КХП»ЦёҙЎЈ
»ъИәРӯН¬ЧчТө
»щУЪ5GТЖ¶ҜНЁРЕЎў3DЧчТөТэөјЎўёЯҫ«¶ИөШНјЎўІо·Ц¶ЁО»Ўў»ъЖчС§П°ЎўАЧҙпөИјјКхЈ¬КөПЦІ»Н¬іөБҫАаРНЦ®јдЧҙМ¬КэҫЭҪ»»ҘәНК¶ұрЈ¬КөПЦ¶аАаРНіөБҫөД°ІИ«ЧҙМ¬К¶ұрЎўЧчТөЧоУЕҫаАлК¶ұрЎўЧчТө°ІИ«ҫаАлұЈіЦЎўЧчТө№эіМјЗВјөИЈ¬ОӘІ»Н¬АаРНіөБҫЦ®јдөДПа»ҘРӯН¬ЧчТөМṩ֧іЦЎЈ
ОЮИЛ»ҜЧчТөёЁЦъ
»щУЪ5GТЖ¶ҜНЁРЕЎўіөФШТФМ«НшЎўCANЧЬПЯЎўКУЖөЎў3DЧчТөТэөјөИјјКхЈ¬ёЁЦъөҘ»ъЧчТөОЮИЛ»ҜЈ¬КөПЦЧчТөИООс№ж»®ЎўЧчТөВ·ҫ¶ЙијЖУлУЕ»ҜЎўЧчТөКэҫЭІЙјҜәНЙПҙ«ЎўЧчТө№эіМК¶ұрәНҪш¶ИНіјЖЎўЧчТөЦКБҝКэҫЭ»ҜЖАІвөИЎЈН¬КұЈ¬Ц§іЦіөБҫ№КХП»тХП°ӯЧҙМ¬ПВЈ¬КөК©ИЛ№ӨёЙФӨФ¶іМІЩЧчЈ¬ёЁЦъОЮИЛ»Ҝ»ъИәРӯН¬ЧчТөҝмЛЩ»ЦёҙХэіЈЧҙМ¬ЎЈ
|





